
Avraham et al., IEEE Trans. on Haptics, 2012
|

Leib et al., J. Neurosci, 2016
|
Avraham et al., J. Neurophys, 2017
|
|
|

Leib et al., J. Neurophys, 2020
|
|
Preprints
- Mikhaylov A., Koren Y., Bar-Haim S., and Nisky I. (2021) "A Novel Tool for Quantitative Assessment of Lower Limb Proprioception: Demonstration with Young Adults, Elderly and Stroke Survivors", submitted for publication in Journal of NeuroEngineering and Rehabilitation. (preprint on ResearchSquare )
- Sharon Y., Naftalovich D., Bahar L., Refaely Y., and Nisky I. (2021) "Combining Time-Dependent Force Perturbations in Robot-Assisted Surgery Training", arxiv.org/abs/2105.03917
- Davidor N., Binyamin Y., Hayuni T. and Nisky, I. (2023) “Design and Validation of a Bimanual Haptic Epidural Needle Insertion”, http://arxiv.org/abs/2301.11036
Journal Papers
- Nomberg R. and Nisky I. (2023) “Human-in-the-loop analysis of delayed haptic rendering -- the effect of delayed feedback control” accepted for publication in IEEE Robotics and Automation Letters
- Agam N., Ashbell I., Katzir A., Basov S., Platkov M., Avital I., Nisky I., Netz U. (2023) “Laser tissue soldering of the gastrointestinal tract: a systematic review” Heliyon, 9(5): E16018
- Nomberg R., and Nisky I., (2023) “Human stabilization of delay-induced instability of haptic rendering in a stiffness discrimination task”, IEEE Transactions on Haptics 16(1): 33 - 45
- Zruya O. and Nisky I. (2022) “Orientation control strategies and adaptation to visuomotor perturbations in rotational hand movements”, PLOS Computational Biology 18(12): e1010248.
- Or Zruya., Yarden Sharon., Hanna Kossowsky., Fulvio Forni, Alex Geftler, Ilana Nisky. (2022) "A New Power Law Linking The Speed to the Geometry of Tool-Tip Orientation in Teleoperation of a Robot-Assisted Surgical System", IEEE Robotics and Automation Letters 7(4): 10762 - 10769
- Thilina D. Lalitharatne, Leone Costi, Ryman Hashem, Ilana Nisky, Rachael E. Jack, Thrishantha Nanayakkara, and Fumiya Iida, (2022) “Face Mediated Human-Robot Interaction for Remote Medical Examination”, Scientific Reports 12, 12592
- Kossowsky H., Farajian M., and Nisky I. (2022) “The Effect of Kinesthetic and Artificial Tactile Noise and Variability on Stiffness Perception” IEEE Transactions on Haptics, 15(2): 351 - 362
- Kossowsky H., and Nisky I. (2022) "Predicting the Timing of Camera Movements From the Kinematics of Instruments in Robotic-Assisted Surgery Using Artificial Neural Networks", IEEE Transactions on Medical Robotics and Bionics, 4(2): 391 - 402
- Itzkovich D., Sharon Y., Jarc A.M., Refaely Y., Nisky I., (2022) “Generalization of Deep Learning Gesture Classification in Robotic-Assisted Surgical Data: from Dry Lab to Clinical-Like Data” IEEE Journal of Biomedical and Health Informatics, 26(3): 1329 - 1340
- Milstein A., Alyagon L., and Nisky I. (2021), "Grip Force Control During Virtual Interaction with Deformable and Rigid Objects via a Haptic Gripper",IEEE Transactions on Haptics, 14(3): 564-576
- Farajian M., Kossowsky H., Leib R., and Nisky I. (2021), "Visual Feedback Weakens the Augmentation of Perceived Stiffness by Artificial Skin Stretch", IEEE Transactions on Haptics, 14(3): 686-691
- Kossowsky H., Farajian M., A. Milstein, and Nisky I. (2021), "The Effect of Variability in Stiffness on Perception and Grip Force Adjustment", IEEE Transactions on Haptics, 14(3): 513-525
- Nomberg R., and Nisky I. (2021) "Human-in-the-loop stability analysis of haptic rendering with time delay by tracking the roots of the characteristic quasi-polynomial -- the effect of arm impedance", IEEE Robotics and Automation Letters, 6(4): 7564–7571
- Sharon Y., Jarc A., Lendvay T., and Nisky I. (2021) “Rate of Orientation Change as a New Metric for
Robot-Assisted and Open Surgical Skill Evaluation”, IEEE Transactions on Medical Robotics and Bionics, 3(2): 414–425 (preprint arXiv:1709.09452 ) - Bitton G., Nisky I., and Zarrouk D. (2021) "A Novel Grip Force Measurement Concept for Tactile Stimulation Mechanisms - Design, Validation, and User Study", IEEE Transactions on Haptics, 14(2): 396 – 408
- Shirley Handelzalts, Giulia Ballardini, Chen Avraham, Mattia Pagano, Maura Casadio, and Ilana Nisky, (2021) “Integrating Tactile Feedback Technologies into Home-Based Telerehabilitation: Opportunities and Challenges in Light of COVID-19 Pandemic” Frontiers in Neurorobotics, 15:4
- Chua Z., Jarc AM., Wren S., Nisky I., and Okamura A., (2020) "Task Dynamics of Prior Training Influence Visual Force Estimation Ability During Teleoperation of a Minimally Invasive Surgical Robot", IEEE Transactions on Medical Robotics and Bionics, 2(4): 586 – 597 (preprint arXiv:2004.13226)
- Leib R., Russo M., DeAvella A., and Nisky I., (2020) “A bang-bang control model predicts the triphasic activity of the muscles during hand reaching”, Journal of Neurophysiology, 124(1): 295-304 (preprint: bioRxiv, 206565).
- A. Portnova, F. Rizzoglio, I. Nisky, M. Casadio, F.A. Mussa-Ivaldi, and E. Rombokas, (2020) “Linear and Nonlinear Dimensionality-Reduction Techniques on Full Hand Kinematics”, Frontiers in Bioengineering and Biotechnology – Bionics and Biomimetics, 8: 429
- Farajian M., Leib R., Kossowsky H., Zaidenberg T., Mussa-Ivaldi F.A., and Nisky I., (2020) “Stretching the skin immediately enhances perceived stiffness and gradually enhances the predictive control of grip force”, eLife 9: e52653. (previously posted on bioRxiv, 203604)
- Avraham C. and Nisky I. (2020) "The effect of tactile augmentation on manipulation and grip force control during force-field adaptation", Journal of NeuroEngineering and Rehabilitation, 17 (1): 1-19.
- Bahar L., Sharon Y., and Nisky I. (2020) "Surgeon-Centered Analysis of Robot-Assisted Needle Driving Under Different Force Feedback Conditions", Frontiers in Neurorobotics 13: 108.
- Basov S., Varassano D., Platkov M., Gabai I., Rosner M., Barequet I., Rattunde M., Wagner J., Harlev M., Ofer D., Nisky I, Dankner Y, and Katzir A. (2019) “Strong Bonding of Corneal Incisions using a Non-Contact Fiber-Optic Laser Soldering Method”, Journal of Biomedical Optics, 24(12): 129801.
- Avraham G.ǂ, Sulimani E.ǂ, Mussa-Ivaldi FA., and Nisky I. (2019) “Effects of Visuomotor Delays on the Control of Movement and on Perceptual Localization in the Presence and Absence of Visual Targets”, Journal of Neurophysiology, 122(6): 2259-2271 [ms] ǂ Equal contribution
- Avraham C., Dominitz M., Khait H., Avraham G., Mussa-Ivaldi FA., and Nisky I. (2019) “Adaptation to Laterally Asymmetrical Visuomotor Delay has a Workspace-Dependent Effect on Action but not on Perception “, Frontiers in Human Neuroscience, 13:312, doi: 10.3389/fnhum.2019.00312
- Buzzi J., De Momi E., and Nisky I., (2019) “Analysis of arm joint variability in 3D and 6D virtual teleoperation: an uncontrolled manifold approach” IEEE Transactions on Biomedical Engineering, 66(2): 391-402, [ms]
- Basov S., Milstein A., Sulimany E., Platkov M., Peretz E., Rattunde M., Wagner J., Netz U., Katzir A., Nisky I., (2018), “Robot-assisted Laser Tissue Soldering System”, Biomedical Optics Express, 9(11): 5635-5644, [ms]
- Avraham C., Avraham G., Mussa-Ivaldi F.A., and Nisky I., (2018) "Neglect-like Effects on Drawing Symmetry Induced by Adaptation to a Laterally Asymmetric Visuomotor Delay”, Frontiers in Human Neuroscience 12:335.
- Sharon Y., and Nisky I., (2018) “Expertise, teleoperation, and task constraints affect the speed-curvature-torsion power law in RAMIS”, Journal of Medical Robotics Research, 3(3): 1841008.
- White O., Karniel A., Papaxanthis C., Barbiero M., and Nisky I. (2018) “Switching in feedforward control of grip force during tool-mediated interaction with elastic force fields”, Frontiers in Neurorobotics, 12:31.
- Milstein A., Ganel T., Berman S., and Nisky I., (2018) “Human-centered transparency of grasping via a robot-assisted minimally invasive surgery system”, IEEE Transactions on Human Machine Systems, 48(4): 349 – 358
- Leib R., Rubin I., and Nisky I. (2018) “Force feedback delay affects perception of stiffness but not action, and the effect depends on the hand used but not on the handedness”, Journal of Neurophysiology , 120: 781-794, [ms]
- Farshchian A., Sciutti A., Pressman A., Nisky I., and Mussa-Ivaldi FA., (2018) “Energy exchanges at contact events guide sensorimotor integration across intermodal delays”, eLife 2018; 7: e32587
- Ballardini G., Carlini G., Giannoni P., Scheidt R.A.ǂ, Nisky I.ǂ, and Casadio M.ǂ (2018) “Tactile-STAR: A novel tactile STimulator And Recorder system for evaluating and improving tactile perception”, Frontiers in Neurorobotics, 12:12 ǂ Equal contribution
- Avraham G., Leib R., Pressman A., Simo L., Karniel A., Shmuelof L., Mussa-Ivaldi F.A., and Nisky I., (2017) “State-Based Delay Representation and Its Transfer from a Game of Pong to Reaching and Tracking”, eNEURO. 0179-17.2017
- Afgin O., Sagi N., Nisky I., Ganel T., and Berman S., (2017) “Visuomotor resolution in telerobotic grasping with transmission delays”, Frontiers in Robotics and AI. 4:54.
- Avraham G., Mawase F., Karniel A. Shmuelof L., Donchin O., Mussa-Ivaldi FA., and Nisky I. (2017), “Representing Delayed Force Feedback as a Combination of Current and Delayed States”, Journal of Neurophysiology, 118(4): 2110-2131 [ms]
- Kato G., Kuroda Y., Nisky I., Kiyokawa K., Takemura H., (2017) “Design and psychophysical evaluation of the HapSticks: A Novel Non-grounded Mechanism for Presenting Tool-mediated Vertical Forces”, IEEE Transactions on Haptics 10(3):338-349 [ms]
- H. E. B. Russell, L. K. Harbott, I. Nisky, S. Pan, A. M. Okamura, J. C. Gerdes, (2016) “Motor Learning Impacts Car-to-Driver Handover in Automatic Vehicles”, Science Robotics 1(1): eaah5682 [ms] [sup]
- Leib R., Mawase F., Karniel A., Donchin O., Rothwell J., Nisky I.*, and Davare M.* (2016) “Stimulation of PPC Affects the Mapping between Motion and Force Signals for Stiffness Perception but not Motion Control”, Journal of Neuroscience, 36(41):10545-10559 [ms] *Equal contribution Featured on issue cover
- Schorr S., Quek Z., Nisky I, Provancher W., and Okamura A. (2015) “Tactor-induced skin stretch as a sensory substitution method in teleoperated palpation”, IEEE Transactions on Human Machine Systems, 45(6): 714-726 [ms]
- Jarc A. and Nisky I. (2015) “Robot-assisted surgery: an emerging platform for human neuroscience research”, Frontiers in Human Neuroscience 9:315. doi: 10.3389/fnhum.2015.00315
- Leib R., Karniel A., and Nisky I. (2015) “The effect of force feedback delay on stiffness perception and grip force modulation during tool-mediated interaction with elastic force fields”, Journal of Neurophysiology, 113(9): 3076-3089. [ms]
- Quek Z., Schorr S., Nisky I., Provancher W., and Okamura A. (2015) “Sensory substitution and augmentation using 3- DoF skin deformation feedback”, IEEE Transactions on Haptics, 8(2): 209-221 [ms].
- Rotella M.F., Nisky I., Koehler M., Rinderknecht M.D., Bastian A., and Okamura A.M. (2015) “Learning and generalization in an isometric visuomotor task”, Journal of Neurophysiology, 113(6): 1873 - 1884 [ms]
- Nisky I., Hsieh M., and Okamura A. (2014) "Uncontrolled manifold analysis of arm joint angle variability during robotic teleoperation and freehand movement of surgeons and novices", IEEE Transactions on Biomedical Engineering, 61(12): 2869 – 2881 [ms]
- Quek Z., Schorr S., Nisky I., Okamura A., and Provancher W. (2014) “Shear Force Rendering with a 1-Degree-of-Freedom Skin Stretch Device for Augmentation of Stiffness Perception”, IEEE Transactions on Human Machine Systems, 44(6): 731-742.
- Fehlberg M.A., Nisky I., Doxon A.J., and Provancher W.R. (2014) “Improved active handrest performance through use of adaptive admittance and virtual fixtures”, IEEE Transactions on Human Machine Systems , 44(4): 484-498.
- Nisky I., Okamura A., and Hsieh M. (2014) “Effects of Robotic Manipulators on movements of novices and surgeons”, Surgical Endoscopy, 28(7): 2145-2158.. [ms]
- Nisky I., Mussa-Ivaldi F.A., and Karniel A. (2013) “Analytical study of perceptual and motor transparency in bilateral teleoperation”, IEEE Transactions on Human Machine Systems, 43(6):570-582 [ms]
- Ostrovsky E. , Zelig U., Gusakova I., Ariad S., Mordechai S., Nisky I.*, Kapilushnik Y.* (2013) “Detection of cancer using advanced computerized analysis of infrared spectra of peripheral blood”, IEEE Transactions on Biomedical Engineering, 60(2):343-353, *Equal contribution
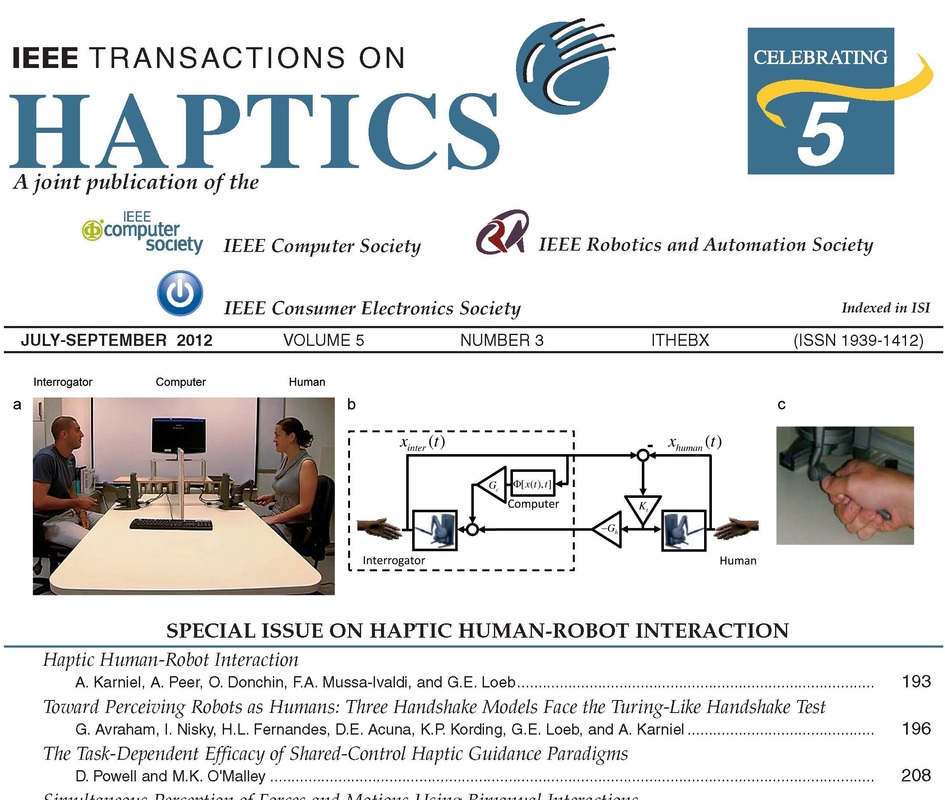
- Avraham G., Nisky I., Fernandes H.L., Acuna D.E., Kording K.P., Loeb G.E., and Karniel A., (2012) “Towards perceiving robots as humans – three handshake models face the Turing-like Handshake test”,IEEE Transactions on Haptics, 5(3): 196-207 Featured on issue cover
- Nisky I., Avraham G., and Karniel A. (2012) “Three alternatives to measure the human-likeness of a handshake model in a Turing-like test.”, Presence: Teleoperators and Virtual Environments, 21(2):156–182[ms]
- Nisky I., Pressman A., Pugh C.M., Mussa-Ivaldi F.A., and Karniel A. (2011) "Perception and action in teleoperated needle insertion," IEEE Transactions on Haptics, 4(3): 155-166
- Karniel A., Avraham G., Peles BC., Levy-Tzedek S., and Nisky I. (2010) "One dimensional Turing-like handshake test for motor intelligence", Journal of Visualized Experiments, 46: e2492
- Nisky I., Baraduc P., and Karniel A. (2010) "Proximodistal gradient in the perception of delayed stiffness",Journal of Neurophysiology, 103(6): 3017-3026
- Nisky I., Mussa-Ivaldi F.A., and Karniel A. (2008) “A regression and boundary-crossing based model for the perception of delayed stiffness,” IEEE Transactions on Haptics, 1(2): 73-83
- Pressman A., Nisky I., Karniel A., and Mussa-Ivaldi F.A. (2008) "Probing Virtual Boundaries and the Perception of Delayed Stiffness," Advanced Robotics, 22(1): 119-140
Conference Proceedings
- Y. Sharon, D. Naftalovich, L. Bahar, H. Kossowsky, Y. Refaely, and I. Nisky (2020) “Preliminary Analysis of Learning a Robot-Assisted Surgical Pattern-Cutting” proceedings of CRAS 2020: The 10th Joint Workshop on New Technologies for Computer/Robot Assisted Surgery, UPC, Barcelona, Spain, September 28-30.
- Michailov A., Koren Y., Bar-Haim S., and Nisky I. (2020) “A Novel Tool for Quantitative Assessment of Lower Limb Proprioception with Healthy Adults, Elderly, and Stroke Survivors”, in the Proceedings of the International Conference on Neurorehabilitation (ICNR 2020), Virtual conference, October 13-16, 2020
- Galofaro E., Ballardini G., Boggini S., Foti F., Nisky I., and Casadio M. (2019) “Assessment of bimanual proprioception during an orientation matching task with a physically coupled object”, IEEE/RAS-EMBS International Conference on Rehabilitation Robotics (ICORR), Toronto, Canada, June 24-28, 2019.
- Golan Y., Sirota B., Shapiro A., Shriki O., and Nisky I. (2019) “A Vibrotactile Vest for Remote Human-Dog Communication”, IEEE World Haptics Conference, Tokyo, Japan, July 9-12, 2019
- Y. A. Oquendo, Z. Chua, M. M. Coad, I. Nisky, A. Jarc, S. WrenC, T.. Lendvay, A. M. Okamura (2019) “Robot-Assisted Surgical Training Over Several Days in a Virtual Surgical Environment with Divergent and Convergent Force Fields”, Proceedings of the 2019 Hamlyn Symposium on Medical Robotics, June 25-28, London, UK
- Itzkovich D., Sharon Y., Jarc A., Refaely Y., and Nisky I. (2019) “Using Augmentation to Improve the Robustness to Rotation of Deep Learning Segmentation in Robotic-Assisted Surgical Data”, accepted for publication at the 2019 IEEE International Conference on Robotics and Automation (ICRA), Montreal, Canada
- Avraham C., and Nisky I. (2018) “Integration of kinesthetic and tactile information for manipulation and grip force control during force-field adaptation”, accepted for publication in the Proceedings of the International Conference on Neurorehabilitation (ICNR 2018), October 16-20, Pisa, Italy
- Milstein A., Basov S., Sulimani E., Platkov M., Peretz E., Netz U., Katzir A., and Nisky I. (2018) “An Ex-vivo Demonstration of a Robotic Laser Tissue Soldering System”, CRAS 2018: The 8th Joint Workshop on New Technologies for Computer/Robot Assisted Surgery, September 10-11, London, UK
- Singh A.K., Berman S., and Nisky I. (2018), “Stochastic Optimal Control for Modeling Reaching Movements in the Presence of Obstacles: Theory and Simulation”, accepted for publication in the Proceedings of the 7th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob 2018), 26-29 August, 2018, Enschede, Netherlands. [ms] preprint: arXiv:1701.01547
- Hu S., Leib R., and Nisky I. (2018) “The Effect of Dissociation Between Proprioception and Vision on Perception and Grip Force Control in a Stiffness Judgment Task”, in: Proceedings of the IEEE Haptics Symposium, March 26-29, San Francisco, CA, USA, pp: 139-144 preprint: https://www.biorxiv.org/content/early/2018/01/23/252536
- Coad M.M., Okamura A.M., Wren S., Mintz Y., Lendvay T., Jarc A.M., and Nisky I. (2017) “Training in Divergent and Convergent Force Fields During a 6-DOF Manipulation Task with a Teleoperated Surgical System", in Proceedings of the 2017 IEEE World Haptics Conference, Munich, Germany, pp: 195-200. [ms][video]
- Sharon Y., Lendvay T., Nisky I., (2016) “Instrument tip angular kinematics in teleoperated needle-driving”, Proceedings of the 2016 Hamlyn Symposium on Medical Robotics, London, UK, [ms]
- Milstein A., Mintz Y., Nisky I., (2016) “The effect of gripper scaling on grip force adjustment in robot-assisted surgery – a preliminary study”, Proceedings of the 2016 Hamlyn Symposium on Medical Robotics, London, UK, [ms]
- Kato G., Kuroda Y., Nisky I., Kiyokawa K., Takemura H., (2015) “HapSticks: Tool-mediated Interaction with Grounding-free Haptic Interface”, SIGGRAPH ASIA 2015 Workshop on Haptic Media and Contents Design, Kobe, Japan
- Kato G., Kuroda Y., Nisky I., Kiyokawa K., Takemura H., (2015) “HapSticks: A Novel Method to Present Vertical Forces in Tool-Mediated Interactions by a Non-Grounded Rotation Mechanism”, in: Proceedings of the 2015 World Haptics Conference, Chicago, IL, USA, pp: 400-407 [ms][video]
- Nisky I., Che Y., Quek Z., Weber M., Hsieh M., and Okamura A., (2015) “Teleoperated versus open needle driving: Kinematic analysis of experienced surgeons and novice users”, in: Proceedings of the IEEE International Conference on Robotics and Automation, Seattle, WA, USA, pp: 5371 - 5377 [ms]
- Quek Z., Schorr S., Nisky I., Provancher W., and Okamura A., (2015) “Sensory substitution of force and torque using 6-DoF tangential and normal skin deformation feedback”, in: Proceedings of the IEEE International Conference on Robotics and Automation, Seattle, WA, USA, pp: 264-271 [ms]
- Quek Z., Schorr S., Nisky I., Provancher W., and Okamura A (2014) “Sensory substitution using 3-Degree-of-Freedom Tangential and Normal Skin Deformation Feedback”, proceedings of 2014 IEEE Haptics Symposium, pp: 27-33, Huston, TX, Best student paper award
- Nisky I., Hsieh M., and Okamura A. (2013) “The Effect of a Robot-Assisted Surgical System on the Kinematics of User Movements”, Proceedings of the 35th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, pp: 6257-6260, Osaka, Japan [ms]
- Kuroda Y., Nisky I., Uranishi Y., Imura M., Okamura A., Oshiro O. (2013) “Novel Algorithm for Real-Time Onset Detection of Surface Electromyography in Step-Tracking Wrist Movements”, Proceedings of the 35th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, pp: 2056-2059, Osaka, Japan [ms]
- Rotella M., Koehler M., Nisky I., Bastian A., and Okamura A. (2013) “Adaptation to Visuomotor Rotation in Isometric Reaching is Similar to Movement Adaptation”, Proceedings of the13th International Conference on Rehabilitation Robotics, Seattle, Washington [ms]
- Nisky I., Hsieh M., and Okamura A. (2013) “A Framework for Analysis of Surgeon Arm Posture Variability in Robot-Assisted Surgery”, Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, pp: 245-251. [talk], [ms]
- Schorr S., Quek Z., Romano R., Nisky I., Provancher W., and Okamura A. (2013) “Sensory substitution via cutaneous skin stretch feedback”, Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, pp: 2333-2338. [ms]
- Quek Z., Schorr S., Nisky I., Okamura A., and Provancher W. (2013) “Sensory augmentation of virtual stiffness using finger pad skin stretch”, Proceedings of the 2013 IEEE World Haptics Conference, Daejeon, Korea, pp:467-472. [ms]
- Nisky I., Patil S., Hsieh M., and Okamura A. (2013) “Kinematic Analysis of Motor Performance in Robot-Assisted Surgery: A Preliminary Study”, in: Studies in Health Technology and Information, 184: 302-308
- Nisky I., Huang F.C., Milstein A., Pugh C.M., Mussa-Ivaldi F.A., and Karniel A. (2012) “Perception of stiffness in laparoscopy – the fulcrum effect”, in: Studies in Health Technology and Information, 173: 313-319 pdf
- Nisky I., Pressman A., Pugh C.M., Mussa-Ivaldi F.A., and Karniel A. (2010) "Perception and action in simulated telesurgery", in: A.M.L. Kappers et al. (Eds.): EuroHaptics 2010, Part I, LNCS 6191, pp. 213-218. Springer, Heidelberg.Finalist in the best poster award competition
- Karniel A., Nisky I., Avraham G., Peles BC., and Levy-Tzedek S. (2010) "A Turing-like handshake test for motor intelligence", in: A.M.L. Kappers et al. (Eds.): EuroHaptics 2010, Part I,LNCS 6191, pp. 197-204. Springer, Heidelberg.
- Leib R., Nisky I., and Karniel A. (2010) "Perception of stiffness during interaction with delay-like nonlinear stiffness", in: A.M.L. Kappers et al. (Eds.): EuroHaptics 2010, Part I, LNCS 6191, pp. 87-92. Springer, Heidelberg.
- Nisky I., and Karniel A. (2010) "Bilateral teleoperation – human operator centered approach", proceedings of 50th Israel Annual Conference on Aerospace Sciences, IACAS 2010, Israel.pdf
- Nisky I., and Karniel A. (2009) "Proximodistal gradient in the perception of delayed stiffness", proceedings of Virtual Rehabilitation 2009 International Conference, VR2009, Haifa, Israel, pp: 105-110. Best student paper award.
- Nisky I., Mussa-Ivaldi F.A., and Karniel A. (2008) "Perceptuo-motor transparency in bilateral teleoperation", proceedings of the ASME 2008 9th Biennial Conference on Engineering Systems Design and Analysis, ESDA2008, Haifa, Israel ,vol.: 2, pp.: 449-456 pdf
Book Chapters
- Nisky I., Leib R., Milstein A., and Karniel A. (2014) “Perception of stiffness with force feedback delay”, in: Multisensory Softness, Editor: Massimiliano Di Luca, Springer Series on Touch and Haptic Systems 2014, pp 167-185.
- Jarc A. and Nisky I. (2020) “Application and exploration of sensorimotor coordination strategies in surgical robotics”, in: Bonsignorio F., Messina E., del Pobil A., Hallam J. (eds) Metrics of Sensory Motor Coordination and Integration in Robots and Animals. Cognitive Systems Monographs, vol 36., pp: 41-71, Springer, Cham
Theses
- Michailov A. (2021) “A Novel Tool for Quantitative Assessment of Lower Limb Proprioception with Healthy Adults, Elderly, and Stroke Survivors”, MSc Thesis, Ben-Gurion University of the Negev (with Simona Bar-Haim)
- Biton G. (2020) “A Novel Grip Force Measurement Concept for Tactile Stimulation Mechanisms - Design, Validation, and User Study”, MSc Thesis, Ben-Gurion University of the Negev (with David Zarrouk)
- Tripto E. (2020) "Computational modeling of protein-RNA binding based on high-throughput in vitro data", MSc Thesis, Ben-Gurion University of the Negev (with Yaron Orenshtein)
- Milstein A. (2020) "Improving RAMIS with a human centered approach to teleoperated grasping and a contact-less laser soldering alternative for suturing", PhD Thesis, Ben-Gurion University of the Negev
- Itzkovich D. (2019) "Using Augmentation to Improve the Generalization of Deep Learning Segmentation in Robotic-Assisted Clinical-Like Surgical Data", MSc Thesis, Ben-Gurion University of the Negev (with Yael Refaely)
- Delrio R. (2019) "Stifness discrimination performance in a simplifed virtual surgical incision task", MSc Thesis, University of Genova, Italy (with Maura Casadio and Fulvio Mastrogiovanni)
- Bahar L. (2019) "Surgeon-centered analysis of robot-assisted needle driving under different force feedback conditions", MSc Thesis, Ben-Gurion University of the Negev
- Ganz Kaduri N. (2018) "“Perception and action in interaction with elastic environment via teleoperated endoscope manipulation”, MSc Thesis, Ben-Gurion University of the Negev
- Nomberg R. (2018) "The contribution of the human to the stability of physical human-robot interaction", MSc Thesis, Ben-Gurion University of the Negev, [pdf]
- Ballardini G. (2017) "Development and testing of a low-cost and wearable tactile stimulation system to train and enhance proprioception", MSc Thesis, University of Genoa, Italy (with Maura Casadio and Robert Scheidt)
- Sulimani E. (2017) "The Effects of Sensorimotor Delay on Perception and Action", MSc Thesis, Ben-Gurion University of the Negev, [pdf]
- Farajian M. (2017) "Stretching the skin of the fingertip creates a perceptual and motor illusion of touching a harder spring", MSc Thesis, Ben-Gurion University of the Negev, [pdf]
- Avraham G. (2017) "Delay representation in the sensorimotor system", PhD Thesis, Ben-Gurion University of the Negev, [pdf] (with Lior Shmuelof)
- Nisky I. (2012) "Perceptuomotor transparency in bilateral teleoperation - the effect of delay on perception and action", PhD Thesis, Ben-Gurion University of the Negev [pdf]
Selected Recent Abstracts
- Yarden Sharon, and Ilana Nisky (2017) “Quantitative characterization of open and robot-assisted needle-driving using the one-sixth power law”, ICRA 2017 Workshop on C4 Surgical Robots: Compliant, Continuum, Cognitive, and Collaborative, Singapore, Finalist of the best presentation award competition. [pdf]
- Jacopo Buzzi, Elena De Momi, Giancarlo Ferrigno and Ilana Nisky (2017) “Arm joint angle variability analysis in virtual robotic teleoperation with two master devices”, ICRA 2017 Workshop on Innovative Haptic Interfaces emerging from Soft Robotics, Singapore
- Amit Milstein, and Ilana Nisky (2017), “The Effect Force Feedback on Human-Centered Transparency in Robot-Assisted Surgery”, Graduate Students in Control workshop, Haifa, Israel
- Avraham G., Leib R., Pressman A., Simo L., Karniel A., Shmuelof L., Mussa-Ivaldi F.A., and Nisky I., (2017) “Representation of visuomotor delay with current state information”, the 27th Annual Meeting of the Neural Control of Movement Society, Dublin, Ireland (Oral presentation by Avraham G.)
- Farajian M., Leib R., Milstein A., Nisky I., (2017) “Adding Artificial Skin Stretch to Kinesthetic Force in Tool-mediated Interaction with Elastic Objects Augments Perception of Stiffness and Grip-Force Control”, the 27th Annual Meeting of the Neural Control of Movement Society, Dublin, Ireland
- Avraham Chen, Avraham Guy, and Nisky Ilana, (2017) “The Effect of Adaptation to a Hemispace-specific Visuomotor Delay on the Symmetry of Drawing” the 27th Annual Meeting of the Neural Control of Movement Society, Dublin, Ireland
- Raz Leib, Amir Karniel, Andrea d'Avella, and Ilana Nisky (2017) “An intermittent control based model predicts the biphasic nature of EMG activity during hand reaching” the 27th Annual Meeting of the Neural Control of Movement Society, Dublin, Ireland
- Avraham G., Leib R., Pressman A., Simo L., Karniel A., Shmuelof L., Mussa-Ivaldi F.A., and Nisky I., (2017) “Representation of Visuomotor Delay as a Spatial Gain Change in Visuomotor Mapping”, 13th Karniel Computational Motor Control Workshop, Beer Sheva, Israel (Best poster award)
- 7Guy Avraham, Anat Shkedy-Rabani, Ofer Groweiss, Ilana Nisky, and Lior Shmuelof (2017) “The Neural Substrates of Error and Success in Adaptation to Visuomotor Rotation”, 13th Karniel Computational Motor Control Workshop, Beer Sheva, Israel
- Ganz N., Leib R., Nisky I., (2017) “In interaction with elastic objects, the variability of action, unlike perception, decreases with increasing stiffness”, 13th Karniel Computational Motor Control Workshop, Beer Sheva, Israel
- Farajian M., Leib R., Milstein A., Nisky I., (2017) “Combining Artificial Skin Stretch and Kinesthetic Force in Toolmediated Interaction with Elastic Objects: the Effect on Perception of Stiffness and Grip Force Control”, 13th Karniel Computational Motor Control Workshop, Beer Sheva, Israel
- Raz Leib, Amir Karniel, Andrea d'Avella, and Ilana Nisky (2017) “An intermittent control based model predicts the nature of EMG activity during hand reaching” 13th Karniel Computational Motor Control Workshop, Beer Sheva, Israel
- Jacopo Buzzi, Elena De Momi, Giancarlo Ferrigno and Ilana Nisky (2017) “Arm joint angle variability analysis in virtual robotic teleoperation with two master devices”, 13th Karniel Computational Motor Control Workshop, Beer Sheva, Israel
- Avraham Chen, Avraham Guy, and Nisky Ilana, (2017) “Adaptation to a Visuomotor Delay Affects Drawing Symmetry” 13th Karniel Computational Motor Control Workshop, Beer Sheva, Israel
- Bahar Lidor#, Haichal Doron#, Milstein Amit, Singh Arun-Kumar, and Nisky Ilana (2017) “State estimation of a cable-driven surgical robot (Raven II) using machine learning techniques – a preliminary study”, Biomedical Engineering 2017, the annual conference of ISMBE, Haifa, Israel (oral presentation by Lidor)
- Avraham C., Avraham G., and Nisky I.(2016) “The effect of asymmetrical visuomotor delay on drawing symmetry” 25th meeting of the Israeli Society for Neuroscience, Eilat, Israel (Oral presentation by Avraham C.)
- Ganz N., and Nisky I. (2016), “In interaction with virtual elastic objects, action, unlike perception, violates Weber’s law”, 25th meeting of the Israeli Society for Neuroscience, Eilat, Israel (Short Oral presentation by Ganz N.)
- Avraham G., Shkedy-Rabani A., Groweiss O., Nisky I., and Shmuelof L. (2016) “The neural substrates of error processing in face of a visuomotor rotation”, 2010 Society for Neuroscience Meeting, San-Diego, CA
- Ganz N., Leib R., Nisky I., (2016) “In interaction with elastic objects, the precision of action, unlike perception, improves with increasing stiffness”, work-in-progress session, EuroHaptics Conference, July 4-7, London, UK.
- Milstein A., and Nisky I., (2016) “The effect of gripper scaling on grip force adjustment in robot-assisted surgery – a preliminary study”, 12th Computational motor Control Workshop, Beer-Sheva, Israel
- Sharon Y., and Nisky I. (2016) “Analysis of surgeon hand and instrument orientation in robot-assisted and open needle driving”, 12th Computational motor Control Workshop, Beer-Sheva, Israel
- Avraham G., Mawase F., Karniel A., Shmuelof L., Donchin O., Mussa-Ivaldi FA., and Nisky I. (2016) “Representation of a Delayed Feedback as a Combination of Current and Delayed States”, 12th Computational motor Control Workshop, Beer-Sheva, Israel, 1st Place Best Poster Award
- Avraham C., Avraham G., Mussa-Ivaldi F.A., and Nisky I. (2016) “Disruption in Simultaneity Representation in Multi-sensory Integration – a Model for the Hemispatial Neglect Syndrome”, 12th Computational motor Control Workshop, Beer-Sheva, Israel
- Bachar L., Haichal D., Milstein A., Singh A., and Nisky I. (2016) “State estimation of a cable-driven surgical robot (Raven II) using machine learning techniques – a preliminary study”, Sensing from Minds to Machines workshop, May 29-30, Beer-Sheva, Israel
- Ganz N., Leib R., and Nisky I. (2016) “Disassociation between the effect of stiffness on accuracy of perception and action in teleoperated interaction with virtual elastic objects”, Israeli Conference on Robotics, April 13-14, Hertzelia
- Milstein A., Ganel T., Berman S., and Nisky I. (2016) “The effect of gripper scaling on transparency of telegrasping in robot-assisted surgery”, Israeli Conference on Robotics, April 13-14, Hertzelia
- Sharon Y., and Nisky I. (2016) “Instrument tip angular kinematics - in the search for new metrics of surgical skill”, the 2016 ISMBE Annual Meeting, Haifa, Israel
- Sulimani E., Weiss R., Avraham G., and Nisky I. (2016) “Perception of hand location, unlike action, is not affected by an adaptation to a sensorimotor delay”, the 2015 ISMBE Annual Meeting, Haifa, Israel
- Avraham G., Farshchiansadegh A., Karniel A., Donchin O., Shmuelof L., Mussa-Ivaldi F.A., and Nisky I., (2015) “Does representation of sensory delays in the motor system depend on the magnitude of the delay?”, 2015 Society for Neuroscience Meeting, October 17-21, Chicago, IL
- Milstein A., Ganel T., Berman S., and Nisky I. (2015) “Preliminary investigation of telegrasping for improving transparency in robot-assisted surgery”, 2nd workshop on human sensorimotor control in robotic surgery, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), October 2, Hamburg, Germany
- Singh A.K., Berman S., and Nisky I. (2015) “Stochastic Optimal Control Formulation for Modeling Reaching Movement in the Presence of Obstacles”, 2nd workshop on human sensorimotor control in robotic surgery, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), October 2, Hamburg, Germany
- Sagi N., Afgin O., Pal T., Ganel T., Nisky I., and Berman S. (2015) “Weber's law during remote grasping”, 2nd workshop on human sensorimotor control in robotic surgery, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), October 2, Hamburg, Germany
- Jarc A., and Nisky I. (2015) “The robot-assisted surgeon: quantifying sensorimotor behavior”, the 11th Karniel Annual Computational Motor Control Workshop at Ben-Gurion University of the Negev, Beer-Sheva, Israel
- Faig H., Okamura A.M., and Nisky I. (2015) “Exploring characterization of movement in robot-assisted and open needle driving”, the 11th Karniel Annual Computational Motor Control Workshop at Ben-Gurion University of the Negev, Beer-Sheva, Israel
- Milstein A., Ganel T., Berman S., and Nisky I. (2015) “Studying perception and action in tele-grasping of small objects for improving transparency in robot-assisted surgery”, the 11th Karniel Annual Computational Motor Control Workshop at Ben-Gurion University of the Negev, Beer-Sheva, Israel
- Sagi N., Afgin O., Pal T., Ganel T., Nisky I., and Berman S. (2015) “Weber's law during remote grasping”, the 11th Karniel Annual Computational Motor Control Workshop at Ben-Gurion University of the Negev, Beer-Sheva, Israel
- Singh A.K., Berman S., and Nisky I. (2015) “A Difference of Convex Stochastic Optimal Control Formulation for Describing Reaching Movements in Presence of Obstacles”, the 11th Karniel Annual Computational Motor Control Workshop at Ben-Gurion University of the Negev, Beer-Sheva, Israel
- Sulimani E., Weiss R., Avraham G., and Nisky I. (2015) “Is the perception of Hand Location Affected by Adaptation to Sensorimotor Delay? ”, the 11th Karniel Annual Computational Motor Control Workshop at Ben-Gurion University of the Negev, Beer-Sheva, Israel
- Avraham G., Farshchiansadegh A., Karniel A., Donchin O., Shmuelof L., Mussa-Ivaldi FA., and Nisky I. (2015) “Representations of Different Magnitudes of Sensory Delay in the Motor System”, the 11th Karniel Annual Computational Motor Control Workshop at Ben-Gurion University of the Negev, Beer-Sheva, Israel 1st Place Best Poster Award
- Avraham G., Mawase F., Shmuelof L., Donchin O., Mussa-Ivaldi FA., and Nisky I. (2015) ”How Does the Sensorimotor System Represent a Delayed Velocity-Dependent Force Field?”, the 25th Annual Meeting of the Neural Control of Movement Society, Charleston, SC, USA (oral presentation by Avraham G.)
- Jarc A., and Nisky I. (2015) "Observing surgeon behavior in robot-assisted surgery: what can we learn?", the 25th Annual Meeting of the Neural Control of Movement Society, Charleston, SC, USA
- Milstein A., and Nisky I. (2015) “Perception of Stiffness in Laparoscopy – the effect of fulcrum and friction”, the 2015 ISMBE Annual Meeting, Haifa, Israel (Finalist of Best Poster Award Competition)
- Avraham G., Mawase F., Shmuelof L., Donchin O., Mussa-Ivaldi F.A., and Nisky I. (2015) "Adaptation to delayed velocity-dependent force field involves both non-delayed and delayed motor primitives”, Zlotowski Center for Neuroscience Annual Meeting, Sede Boker, Israel (Best Poster Award)
- Avraham G., Leib R., Shmuelof L., Donchin O., Nisky I., and Mussa-Ivaldi F.A. (2014) “Running late or running behind – sensory delay representation in the motor system”, 23rd meeting of the Israeli Society for Neuroscience
- Nisky I., Hsieh M., and Okamura A. (2014) “Towards understanding of surgeon motor control in robotic surgery”, 23rd meeting of the Israeli Society for Neuroscience
